
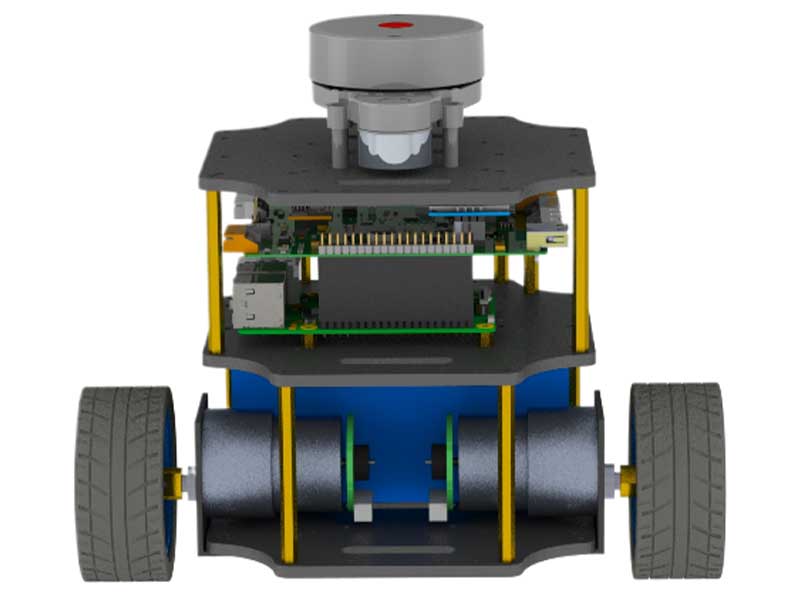
移动抓取复合机器人是一款专为室内和室外环境设计的开源复合机器人,具备四轮全驱底盘和多种传感器,包括激光雷达、深度相机、机器人控制器、六轴协作机器人和夹爪等。机器人能够完成 SLAM 地图构建、自主导航、精确定位、视觉识别与引导、物体抓取等任务。
移动抓取复合机器人教学科研平台不仅满足了教学需求,为学生提供了实践操作的平台,帮助他们更好地理解机器人操作系统、智能机器人开发与实践、机器人学等课程内容,同时也适用于农业采摘、物体视觉抓取等科研领域的需求。其广泛的应用前景使得它成为教育、科研以及实际生产和服务领域中的重要工具。

产品特点1 集成丰富的应用功能以及硬件支持——兼收并蓄
产品特点2 提供三维仿真模型辅助开发——资源丰富
产品特点3 提供自主路径规划与导航——功能完善
产品特点4 视觉识别抓取,操作灵活——灵活易用
产品特点5 底盘定位精度可达5cm——高精准度
配套课程1 机器人操作系统
配套课程2 智能机器人开发与实践
配套课程3 机器人学

 京公网安备11010702001991号
京公网安备11010702001991号