
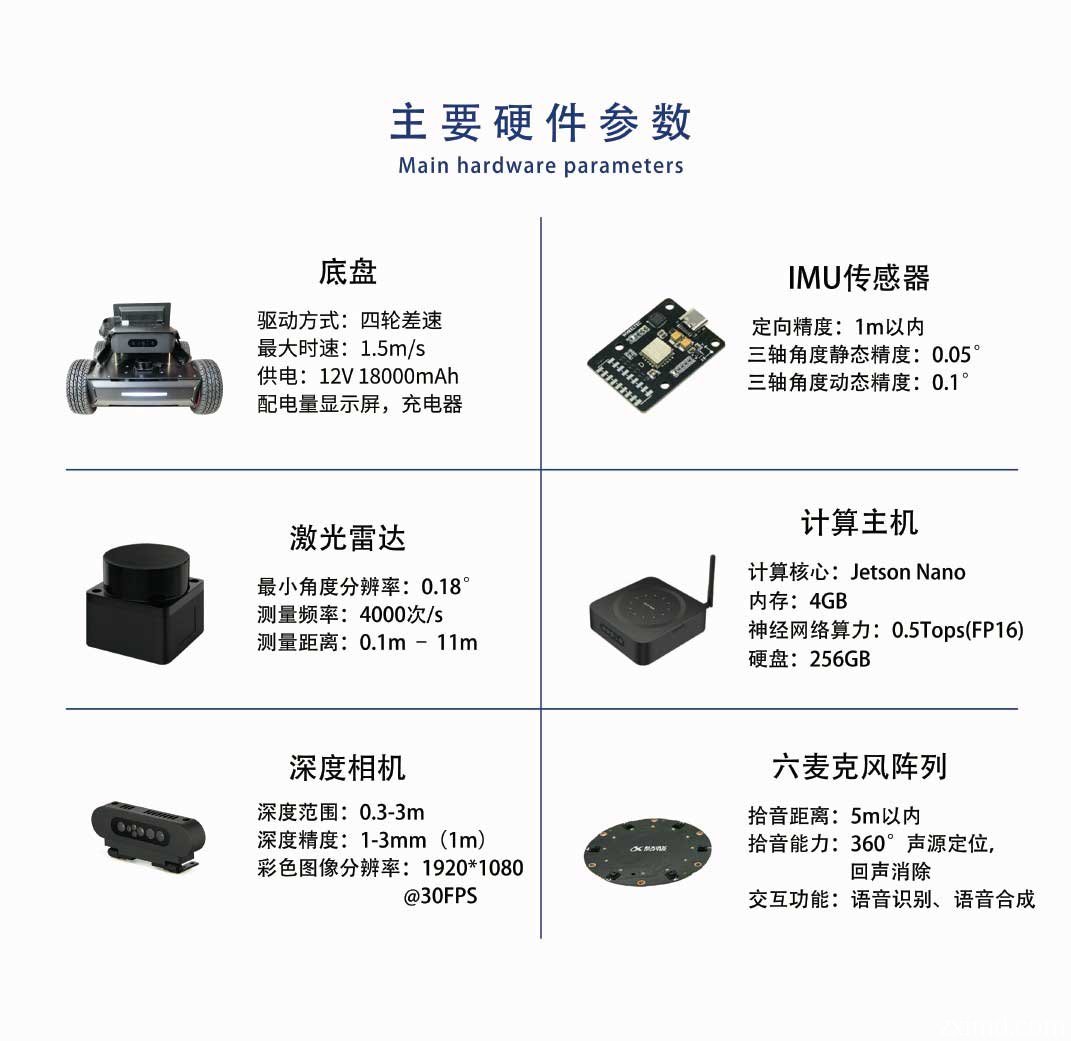
算力强劲的人工智能主机
深度学习教学平台主机采用性价比极高的英伟达计算主机Jetson Nano,配置高性能的四核64位ARM CPU,可用于各种机器人控制算法的实现,同时搭载128核的NVIDIA GPU,可提供472 GFLOPS的计算性能,还包括4GB LPDDR4存储器,采用高效,低功耗封装,具有5W / 10W功率模式和5V DC低电压输入能力。具有图形加速能力,内置NVIDIA CUDA Toolkit和TensorRT等库。SDK包括主流的开源机器学习(ML)框架,如TensorFlow,PyTorch,Caffe,Keras和MXNet,以及计算机视觉和机器人开发的框架,如OpenCV和ROS;
自主研发的高性能运动控制器
底盘控制器采用STM32F407高性能ARM处理器,主频高、资源丰富。可实现板载陀螺仪数据采集与解算、4路直流减速电机编码器数据采集与车速PID/MFAC闭环控制、四轮差速底盘运动解析及控制接口、与车载计算模块的数据通信;控制器进行深度定制,不仅支持c/c++开发,同时可支持python语言开发;
灵活易用的开源实时操作系统
底盘控制器搭载国产优秀的嵌入式实时操作系统RT-Thread,实现所有内核功能模块调用、Finsh shell命令行交互模块。可扩展文件系统管理、网络系统管理、支持Python编程的MicroPython系统框架、基于四轮差速底盘智能车的控制系统框架;提供RT-Thread操作系统的完整例程和教学课程;
丰富的人工智能和机器视觉案例
深度学习教学平台支持Web页面浏览摄像头;基于openCV的人脸识别、车道线识别、巡线;Yolo交通标识识别、手势识别、物体识别;Unet语义分割实现车道线检测;语音交互与声源定位;3D视觉建图与导航;多机器人编队;深度视觉跟随;
完善的ROS机器人系统功能
车载计算主机搭载Ubuntu18.04版本Linux操作系统,配置ROS及相关开发工具,实现ROS核心通信机制及组件、对底盘状态监测及运动控制、ROS分布式远程开发、摄像头数据采集与处理、SLAM建图与导航、声源定位、语音识别、Gazebo仿真环境,提供完整代码。


 京公网安备11010702001991号
京公网安备11010702001991号